OUT-LINK TETHER: Beyond GEO
Thought Experiment (TE) considers innovative ways to leverage Space Elevator (SE) beyond Geosynchronous Equatorial Orbit (GEO).
FROM EARTH TO APEX ANCHOR (AA)
Beyond GEO: For climber operations beyond GEO, TE names them "Out-Link" operations.
| BACKGROUND: TYPICAL TETHERS | |
|---|---|
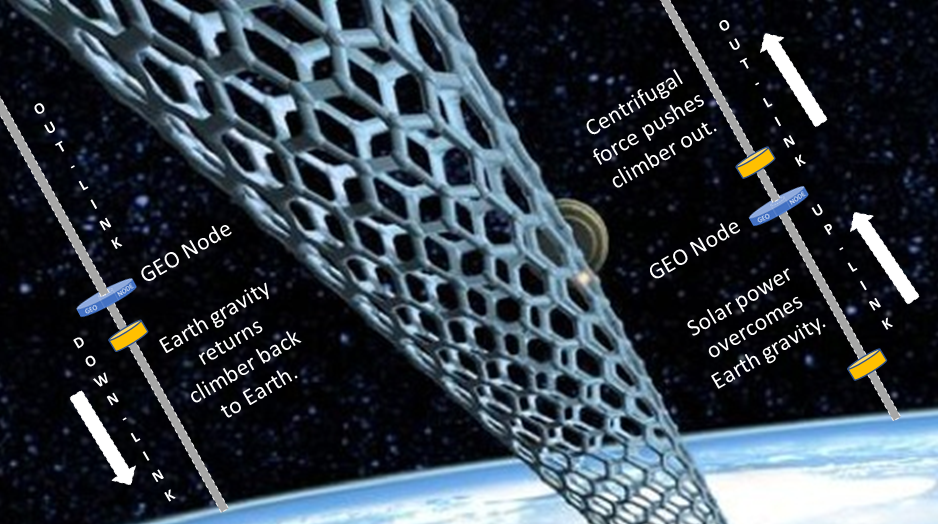 |
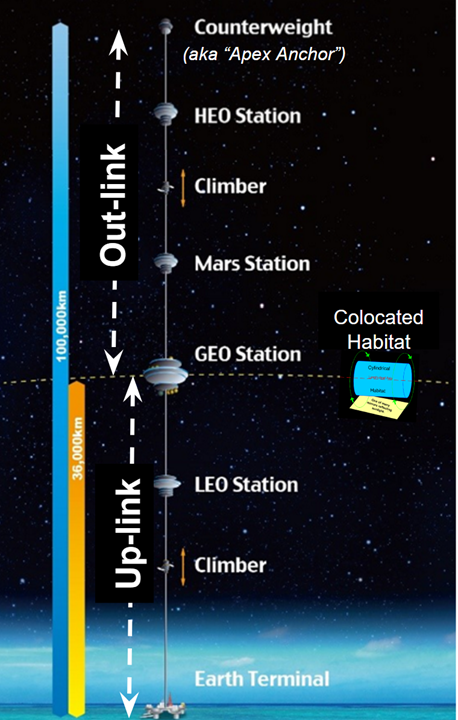
Up-Link tether stretches to GEO from Earth's ocean. Climbers use solar power to overcome Earth's gravity which ever decreases until arrival at GEO Node.
Down-Link tether uses Earth's gravity to accelerate climber back to Earth's surface. Power for a timely deceleration might come from an Earth based particle beam.
Out-Link tether enables delivery of payloads beyond GEO. Stretching from GEO Node to Apex Anchor (AA), an Out-Link tether sits atop the Up-Link; another sits atop the Down-Link; both are bounded by a GEO Node. Out-Link provides ever increasing centrifugal force to push climber further out from Earth. Along the Out-Link tether, many points have sufficient orbital speeds for payload satellites to escape Earth's orbit and travel "interplanetary" throughout the inner Solar System.
Tether Maintenance. To keep tether in tip top shape, TE assumes every climber continually monitors tether for anomalies. Perhaps an occasional climber could be scheduled to do strictly tether repairs. |
| BACKGROUND: CLIMBER PHASES | |
| TE considers Out-Link as one of SE's 4 operational, climber phases.
① Up-Link Phase. All climbers would travel from Marine Anchor up to GEO Node where they may either offload their payload or or retain it for continued transport. ② Cross-Link Phase. Space tug transports climber along Geosynchronous Equatorial Orbit (GEO) from Up-Link GEO Node to Down-Link GEO Node. ③ Down-Link Phase. Typical climber returns from GEO back to Earth surface via dedicated Downlink Tether. It might return empty or carry retrograde cargo destined for Earth. ④ Out-Link Phase Climbers continue beyond GEO. With a slight outward push from either GEO Node; centrifugal force accelerates climber further outward. Of course, climber must decelerate prior to its destination; power for deceleration would most likely come from same solar panels which powered it in Up-Link phase. This chapter discusses Out-Link Phase in more detail. |  |
| OUT-LINK GATEWAYS | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
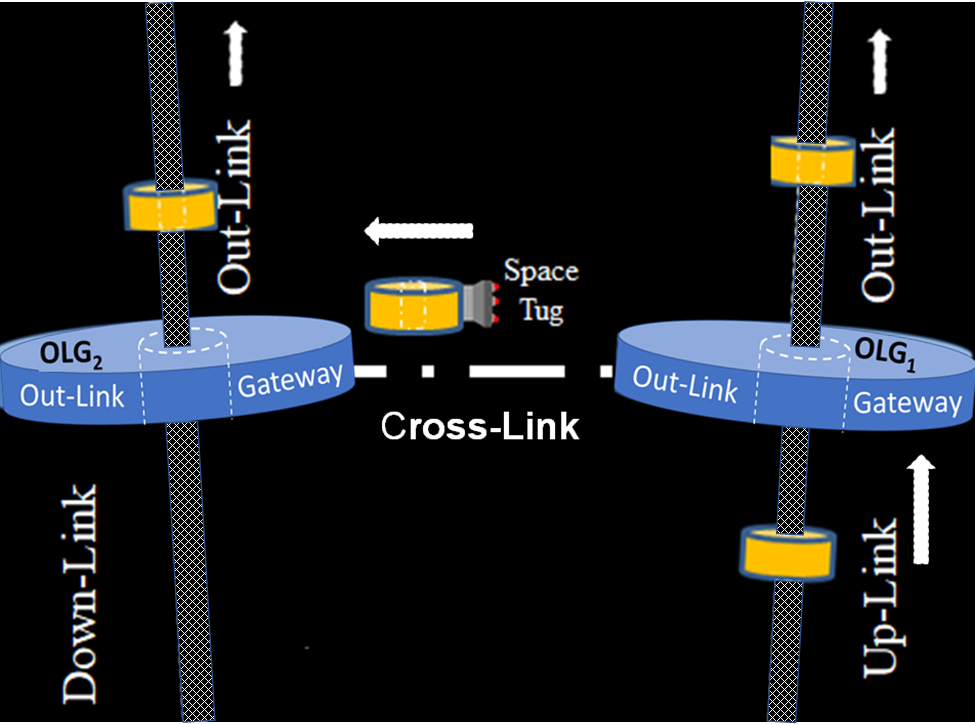 |
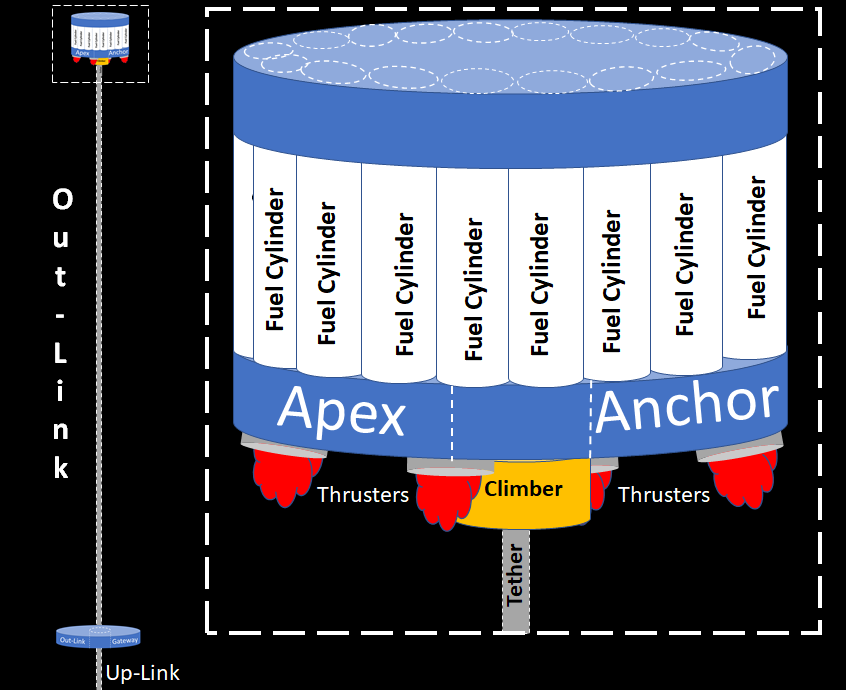
TE defines "gateway" as a transition station between dissimilar links. Of course, an Out-Link Gateway (OLG) connects an Out-Link with other type links. The first Out-Link Gateway (OLG1) is atop the Up-Link tether which hosts climbers using solar power to overcome Earth's gravity. OLG1 is also at the bottom end of an Out-Link tether which provides centrifugal force for climbers to travel further out from Earth. OLG2 is atop the Down-Link tether; OLG2 interfaces an Out-Link with the "Cross-Link", a non-tethered, space tug connection from OLG1. Upon arrival at either OLG, a typical climber off-loads and/or on-loads cargo to prepare for subsequent link. BACKGROUND: Typical climber launches from an Equator based Marine Anchor in the Pacific Ocean. It ascends the Up-Link tether to Out Link Gateway One (OLG1). Most climbers will return to Earth via OLG2; then, descend the Down-Link tether to another Marine Anchor. However, some climbers will not return; instead, they will become part of an Apex Anchor atop one of the Out-Link tethers. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| CROWN OUTLINK WITH APEX ANCHOR (AA) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| First version AA will likely leverage lots of Artificial Intelligence (AI) with appropriate mix of autonomy and remote control. With no need for human life support, port for climber can stay open; AI likely works better in vacuum than in Earth like environment.
TE proposes: One way only. Designated Out-Link climbers and some payloads) will end their existence inside AA to further increase its mass. TE assumes a mass manufacturing, economy of scale can create many climbers much like we now manufacture automobiles, TE further assumes an economical "end of life" for Out-Link climbers as part of the cost of business for SE Enterprise (much cheaper than disposable fuel tanks, i.e., "stages" of current chemical rocket launches.) Sources of Mass. Out-Link climbers (6-20 tons each) can contribute significant mass for the AA. In fact, mass manufacturing of many "expendable" climbers might yield an extremely useful economy of scale. Ending their lives on Out-Link missions would certainly be much cheaper than disposable "stages" for current chemical rocket launches, each rocket stage (plus fuel) now costs many millions of dollars. With no need for any Out-Link climber to return back to GEO Node, this greatly eases scheduling of subsequent Out-Link missions. For more AA mass, we might collect dead satellites from deprecated GEO missions and raise them to the AA on Out-Link climbers destined to stay. Other sources might eventually include: ---Added mass from Earth as required. ---Space debris, perhaps passing asteroids. |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| UPGRADE APEX ANCHOR AS HABITAT | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Later version AA role could be performed by a Habitat as described by Dr. Gerard O'Neill in his book, High Frontier. Longitudinal spin would produce centrifugal force to simulate Earth gravity. At 225 m radius, O'Neill's conceptual "Island 1" Habitat could easily host 1,000 humans (and some animals) to provide most comforts of home on Earth. A similar habitat could also do role of GEO Node as shown in left side diagram.
SE System Mass Management: AA’s principle task is to stabilize the entire SE and continuously monitor each element of the infrastructure. Critical functions include: 1) Keep SE's center of mass precisely at GEO. 2) Continually monitor any and all changes in mass center or motion as the climbers are mount and move throughout the tether. AA Mission: Stabilize Out-Link Tether. At the top of the Out-Link, AA's outward force ensures a taunt tether. Also, AA can reel the tether in/out as required for various tasks such as space debris avoidance, damping tether end vibrations, and reacting to emergencies. Also, AA will store and burn fuel to provide thrust as required; thus, AA is much more than mere mass at end of tether. With continuous thrust capability, AA can greatly reduce impact of dynamic change. EXAMPLE: AA can stay in designated location even if tether severs in the lower Up-Link portion (most likely location of severance). Due to continuous communication, Earth based Tether Ops Center (TOC) can ensure decisive actions are quickly coordinated among operational personnel on habitats at both AA and GEO. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ORBITAL VELOCITIES VS. TETHER VELOCITIES | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Orbit Bound Vehicles
have different velocities in different orbits to comply with Kepler's Third Law. Thus, orbital velocity slows as orbit elevation increases.
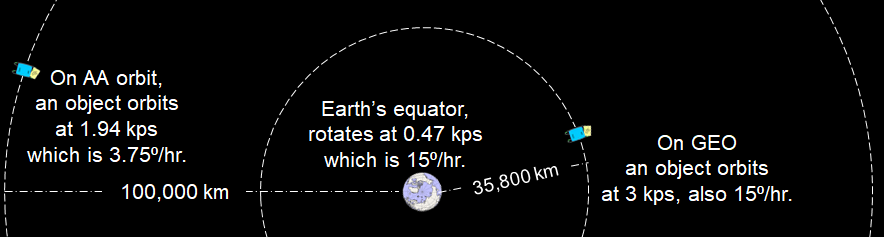 | 
At a constant 15°/hr, all tether bound objects share constant nadir regardless of orbital elevation. However, linear velocity increases with orbital elevation; thus, they defy Kepler's Third Law. Some Out-Link point velocities greatly exceed Earth's escape velocity and could launch interplanetary payloads.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| SPACE ELEVATOR'S OUT-LINK CAN BE "CONVEYOR BELT" | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Due to light centrifugal force (from .025 to .05 g), Out-Link payloads will gently "coast" to higher altitudes on their way to AA. Up-Link's climber must overcome Earth's gravity by repetitive straining the tether; however, Out-Link's conveyor car puts very little stress on tether. Relatively small centrifugal force gently "pushes" conveyor vehicle outward (i.e. "radial") toward AA.
Due to light centrifugal force (from .025 to .05 g), Out-Link payloads will gently "coast" to higher altitudes on their way to AA. Up-Link's climber must overcome Earth's gravity by repetitive straining the tether; however, Out-Link's conveyor car puts very little stress on tether. Relatively small centrifugal force gently "pushes" conveyor vehicle outward (i.e. "radial") toward AA.HOWEVER, even "gentle" acceleration will over hours push car to very high radial velocities; thus, car needs energy for deceleration:
---Perhaps deploy very large solar panels, collect energy to store as heat in water.
---Store water in outer hulls of each conveyor "car". To decelerate back to relative zero exactly at AA, jettison precise amounts of charged, high speed particles (ions) toward AA. Consequently, subsequent conveyor cars must be spaced apart to not suffer from these particles. AA might deploy magnetic "nets" to capture as many high speed ions as possible to protect AA infrastructure. | 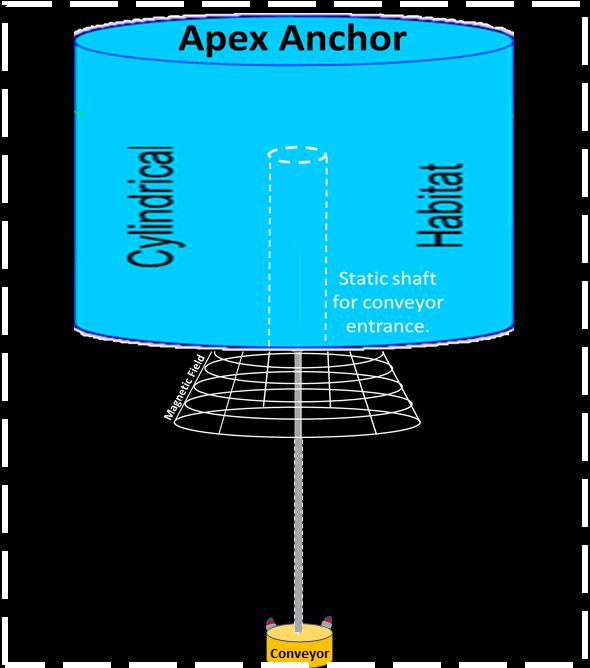 TE proposes conveyor nozzles eject high speed particles to 1G decelerate vehicle for last 1/2 hour of travel from GEO Node. TE Assumes: 1) Tether not damaged by high speed particles 2) AA’s magnetic field effectively collects high speed particles 3) Particle speed is about .1 c. 4) Fuel for 1/2 hour of 1g deceleration is less than 1% GW. 5) To avoid radioactive damage from high speed particles from subsequent conveyors, schedule them at least 30 minutes apart. 6) Conveyor hull contains significant water quantity to provide good radioactive shielding as well as essential supplies for AA crew. 7) Above measures keep any radioactivity to well within tolerance levels for human environment. To accumulate sufficient mass for AA counterweight, consider exporting massive amounts of material from Mother Earth. To terraform AA Habitat, Out-Link Cargo might include: ---frozen blocks of sea ice. ---tons of Terran topsoil ---infrastructure components and equipment ---payloads for interplanetary missions. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

| OUT-LINK'S TETHER BOUND PARAMETERS | |||||||||||||||
| above MSL | + Earth Radius |
Incr Dist | Tangential Linear_Vel | Escape Velocity |
Point Rad_Accel | Average Rad_Accel |
Estimated Trav Time |
Point Radial Vel |
1 g Deceleration to Zero | ||||||
| km | km | km | km/sec | km/sec | m/sec² | decimal g | Incr(hr) | Cum(hr) | kps | mph | sec | km | Rem_Dist | Diff_Dist | |
| GEO Node | 35,786 | 42,164 | n/a | 3.066 | 4.348 | 0.223 | n/a | 0 | 0 | 0 | 0 | 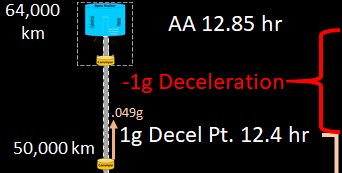 |
|||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Out-Link1 | 43,621 | 50,000 | 7,836 | 3.636 | 3.993 | 0.264 | .025 g | 2.2 | 2.2 | 1.95 | 4,372 | ||||
| Out-Link2 | 53,621 | 60,000 | 10,000 | 4.363 | 3.645 | 0.317 | .030 g | 2.3 | 4.5 | 4.37 | 9,767 | ||||
| Out-Link3 | 63,621 | 70,000 | 10,000 | 5.091 | 3.375 | 0.370 | .035 g | 2.1 | 6.6 | 6.99 | 15,632 | ||||
| Midway | 67,893 | 74,272 | 4,272 | 5.401 | 3.276 | 0.393 | .039 g | 1.3 | 8.0 | 8.79 | 19,671 | 897 | 3,943 | 32,106 | 28,163 |
| Out-Link4 | 73,621 | 80,000 | 5,728 | 5.818 | 3.157 | 0.423 | .042 g | 1.5 | 9.4 | 10.96 | 24,507 | 1,117 | 6,119 | 26,378 | 20,259 |
| Out-Link5 | 83,621 | 90,000 | 10,000 | 6.545 | 2.976 | 0.476 | .046 g | 1.9 | 11.3 | 13.95 | 31,214 | 1,423 | 9,928 | 16,378 | 6,450 |
| 1G Dec Pt. | 87,229 | 93,608 | 3,608 | 6.807 | 2.918 | 0.495 | .050 g | 1.1 | 12.4 | 15.83 | 35,401 | 1,614 | 12,770 | 12,770 | 0 |
| Out-Link6 | 93,621 | 100,000 | 6,392 | 7.272 | 2.823 | 0.529 | .052 g | 1.4 | 13.7 | 17.12 | 38,305 | 1,746 | 14,950 | 6,378 | -8,572 |
| AA | 100,000 | 106,378 | 6,378 | 7.736 | 2.738 | 0.563 | .056 g | 1.3 | 15.0 | 19.76 | 44,207 | n/a | n/a | n/a | n/a |
| Given | r | di= ri -ri-1 |
v =C/T = 2πr/86,400 sec |
ve = √(2μ/r) |
a = v2/r |
aAve-g =(ai+ai+1)/2g | ti = √(2×di/aAve) |
v = vo+ aAve×t |
tDc= v/g |
dDc= gt2/2 |
dRm = dAA - r |
dDiff= dRm-dDc |
|||
| TC | Prev | SUMMARY |
|---|
• assemble and fuel systems
• deploy mission payloads
• capture returning payloads
Thus, AA will be far more than “just be a counterweight at the end of the space elevator.” In fact, O'Neill's spinning Habitat could enable the AA to host over a 1,000 humans as well as numerous flora / fauna for a pleasant, Earth like environment.
To reach AA, payload will likely use several vehicle types.
First, climber must launch from Earth's Marine Anchor, climb the Up-Link tether to overcome Earth's gravity; then, reach the GEO in about 7 days.
Next, payload must use the Out-Link Gateway to transition to an Out-Link conveyor to travel beyond GEO via centrifugal force.
The payload's acceleration and speed ever increases as it continues outward toward the Apex Anchor (AA) at 100,000 km from Earth's surface. While traveling final portion of Out-Link, payload must decelerate to zero speed precisely at AA.
Out-Link travel time could be less than 13 hours.
CONCLUSION:
Conveyors travel the Out-Link,
and Apex Anchor crowns the Out-Link,
| VOLUME 0: ELEVATIONAL |
|---|
| VOLUME I: ASTEROIDAL |
| VOLUME II: INTERPLANETARY |
| VOLUME III: INTERSTELLAR |
posted by JimODell at 2:14 AM
![]()
![]()

0 Comments:
Post a Comment
<< Home