HABITATS CAN MINE MINERALS from Asteroids
| CONTENT |
|---|
| BACKGROUND: ASTEROID TYPES |
| CURRENT TECHNOLOGY |
| TYPES OF SPACE FARING ROBOTS |
| DEEP SPACE MINING METHODS |
| ASTEROID SELECTION |
| SPACE TUGS AND HABITATS |
| SUMMARY |
_mathilde.jpg) 253 Mathilde, a C-type asteroid |
C-type asteroids are carbonaceous asteroids, the most common variety, forming around 75% of known asteroids. They are distinguished by a very low albedo because their composition includes a large amount of carbon. In addition to organic carbon, they contain water (H2O, Hydrogen & Oxygen). All three elements are key ingredients for agriculture. C-type asteroid's high abundance of water could prove useful. |
| S-type asteroids are silicaceous asteroids with a stony composition. About 17% of asteroids are of this type. They are moderately bright (with an albedo of 0.10 to 0.22) and consist mainly of iron- and magnesium-silicates. They contain many metals: nickel, cobalt and even valuable metals such as gold, platinum and rhodium. A small 10-meter S-type might contain about 650,000 kg (1,433,000 lb) of metal with perhaps 50 kg (110 lb) of rare metals like platinum and gold. | .jpg) 433 Eros, S-type asteroid |
CURRENT TECHNOLOGY proposes probes to detect and analyze asteroids. | |
| Planetary Resources proposed several types: | |
 |
 |
| Deep Space Industries has several families of space-borne probes: | |
 Fireflies are triplets of nearly identical spacecraft in CubeSat form launched to rendezvous with asteroids and examine them. Fireflies are triplets of nearly identical spacecraft in CubeSat form launched to rendezvous with asteroids and examine them. |
 DragonFlies deploy in formations of three similar spacecraft to gather small samples (few kilograms) and return them to Earth for analysis. DragonFlies deploy in formations of three similar spacecraft to gather small samples (few kilograms) and return them to Earth for analysis.
|
A four-legged robot, the size of a cigar box, might hop around an asteroid like a grasshopper. |
Burrow for Data: Some propose a robotic subsurface explorer (SSX), a snake-like device, to drill into an asteroid's regolith to determine available ores. It might drill many kilometers for comprehensive analysis. | ||||
NANOBOTS TO THE RESCUE. Nano-robots, "nanobots, are tiny Artificial Intelligence (AI) devices. Numerous nanobots aboard a habitat could form a "bot colony," to perform designated tasks both in and out of the vessel. With a small degree of autonomy, such groups could ensure essential functions. Inside the habitat, examples include:
|
A two-legged "walking" robot might be best able to traverse rough terrain commonly found on large rocky objects such as dwarf planets, planetary moons and large asteroids. |



 Scoop. Typical asteroid is a collection of rocks and dust. For such bodies, miners might scrape some material off the surface of some asteroids using a simple scoop. Scoop. Typical asteroid is a collection of rocks and dust. For such bodies, miners might scrape some material off the surface of some asteroids using a simple scoop. |
 Harpoon. For some solid asteroids, mining operators could use a harpoon. A projectile would penetrate the surface to anchor the mining vessel; then, mining operators would use the attached cable to winch equipment to the surface. Harpoon. For some solid asteroids, mining operators could use a harpoon. A projectile would penetrate the surface to anchor the mining vessel; then, mining operators would use the attached cable to winch equipment to the surface. | |||||
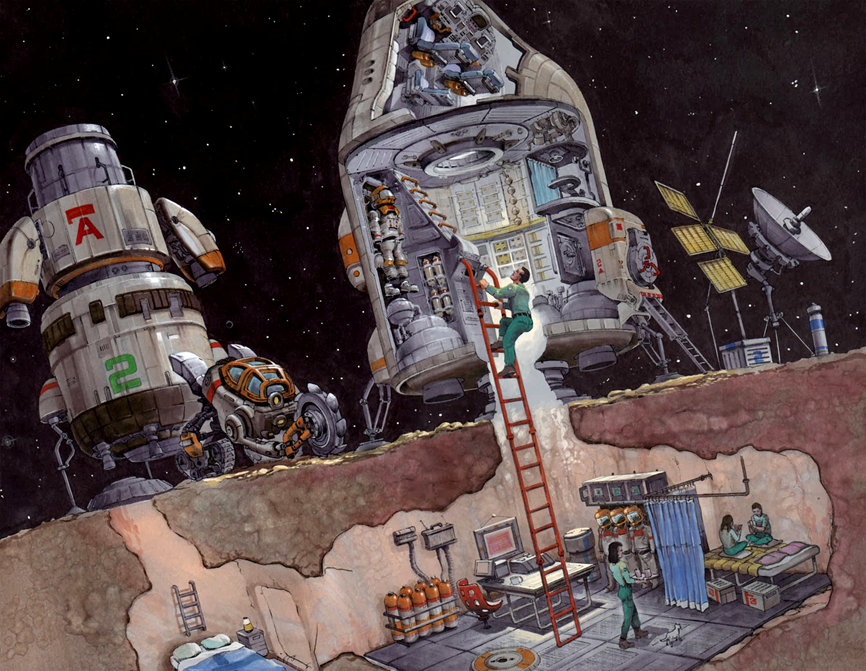 Shaft Mining. Mine operators can dig into a solid asteroid to extract material via a system of vertical and horizontal shafts much like traditional mining on Mother Earth. As an bonus, this shaft system might make excellent subsurface shelters for mine operators. Shaft Mining. Mine operators can dig into a solid asteroid to extract material via a system of vertical and horizontal shafts much like traditional mining on Mother Earth. As an bonus, this shaft system might make excellent subsurface shelters for mine operators. |
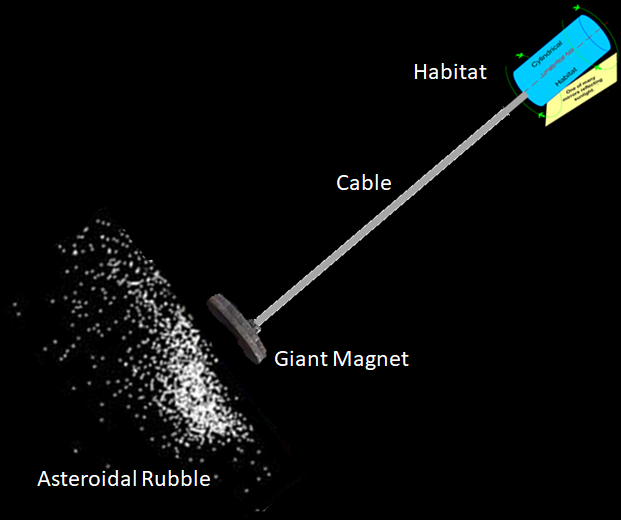 Magnetic Rake. Asteroids with a high metal content may be covered with loose metallic grains to be gathered with a magnet. Magnetic Rake. Asteroids with a high metal content may be covered with loose metallic grains to be gathered with a magnet.
EXAMPLE: After some analysis, a deployed, smaller habitat (miner) might extend a giant magnet to a suitable asteroid. | |||||
On extinct comets, heat can melt and even vaporize the matrix to facilitate recovery of volatiles. |
||||||
| ASTEROID SELECTION | ||||||
|---|---|---|---|---|---|---|
 ---Select most promising asteroids via trade offs between location and resources. ---Tug takes smaller habitat (miner) to vicinity of target asteroid. ---Miner can deploy Artificial Intelligence (AI) probes for more analysis. ---When ready, tug can move payloads of asteroidal material back to cycler for more processing. |
2) Process high-value minerals on-site to reduce cycler load, and perhaps produce propellant for future use of the space tug. 3) Transport the asteroid to a convenient orbit, perhaps around Luna, Terra or even Sol, co-located in Terra's solar orbit. Thus, asteroids would be safely, efficiently processed by humans with much easier access to Mother Earth. | |||||
| TE PROPOSES SPACE TUGS & HABITATS to haul all the probes and robots to the asteroids. | ||||||
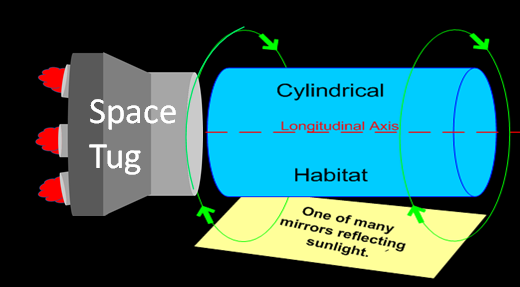 | Habitat provides all the comforts of home back on Mother Earth such as spinning hull's centrifugal force to simulate gravity, reflected sunlight for energy, on-board water supply for many uses, terraformed interior for plentiful flora and fauna. Thousands of humans can happily live on board for years and perhaps their entire lives. With regards to mining, these huge cylindrical structures have considerable capacity to manufacture and transport many devices to work the asteroids. Space tug will propel the habitat into the many orbit changes needed to attain convenient position near targeted asteroid. After successful orbit change, space tug will likely separate from the habitat to do other missions: propel other habitats, transport payloads throughout the inner Solar System, etc. | |||||
|
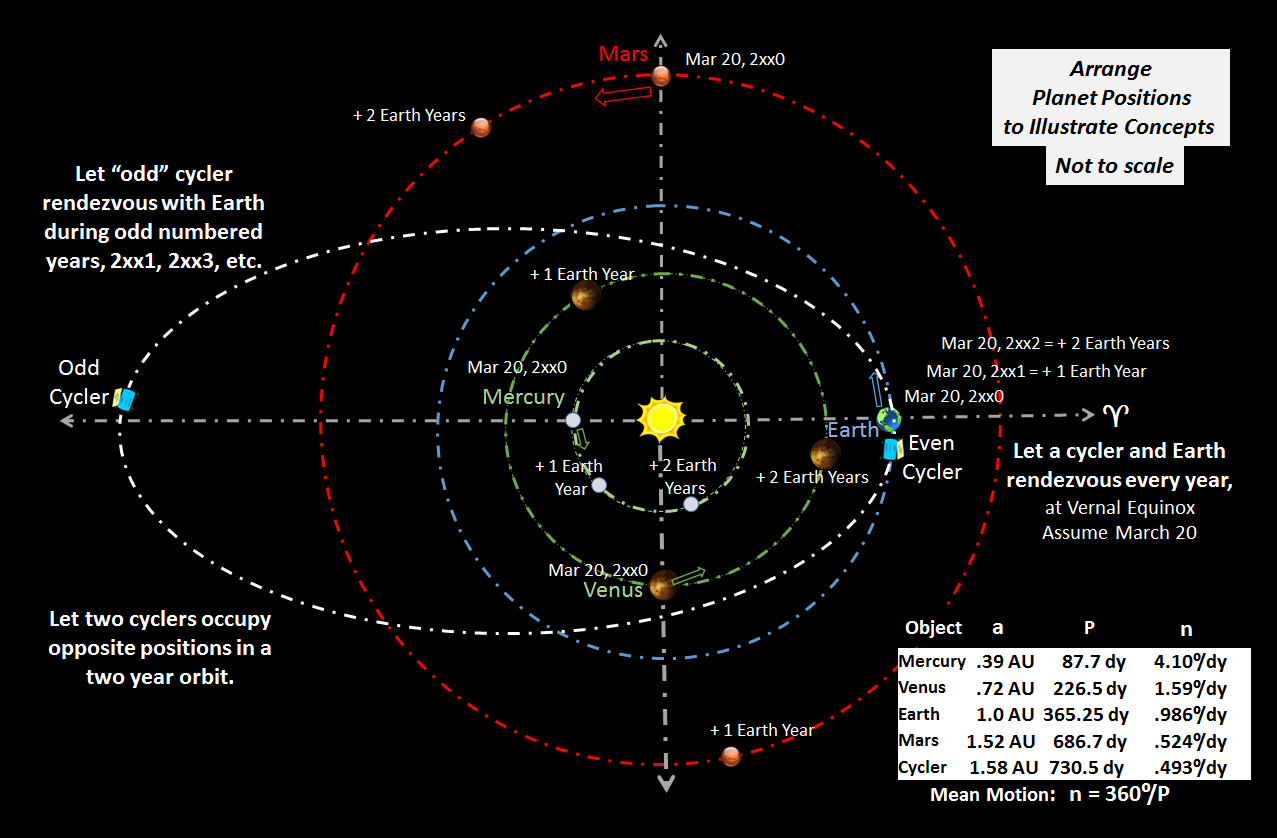
TRANSFORM NEA. Typical cycler will likely be a habitat transformed from a Near Earth Asteroid (NEA). A cycler trip will be lengthy, but a large internal volume and Earth-like gravity (from centrifugal force due to longitudinal spinning) can make a cycler orbit a very pleasant voyage with many traveling companions (easily 10,000 passengers). ADJUST ORBIT. Just as an asteroid can transform into a comfortable habitat, its orbit can transform into a 2 year cycle. The perihelion can rendezvous with Earth every two years. Thus, cycler orbit perihelion becomes q=1 AU, and it does biennial rendezvous as shown. Other considerations: ● Avoid Luna. Carefully plan cycler orbit to not collide with Earth's moon. ● Annual event: add another cycler exactly 180° from the other one (see diagram). Thus, one cycler would rendezvous with Earth on even years (i.e., 2024, 2026, 2028, ...) and other cycler on odd years (2025, 2027, 2029, ...) ● Adjust inclination (i) as needed to access more celestial objects. |
 |
|||||
 |
TE PROPOSES: Increase Cycle Size
For access to many more Asteroid Belt Objects (ABOs) throughout the region between Mars and Jupiter, cyclers need to pursue bigger cycles of three and even four years. Note a 5 year cycle extends to near the orbit of Jupiter.TE assumes max practical absence away from Mother Earth to be four years, length of typical college education or perhaps a hitch in the military. Thus, consider the 4 year cycle as optimal trade-off between asteroid access and time away from Earth. Furthermore, maintain the sensible method of annual earthly rendezvous by properly spacing four habitats throughout the cyclic orbit. Thus, a cycler rendezvous with Earth would be an annual event. EXAMPLE: Cycler rendezvous could happen every year at March 20. | |||||
TE PROPOSES: Multiple Cycles
To gain even more access to ABO region, we could add more four year cycler orbits, each orbit would rendezvous near Earth at a different date. EXAMPLE: We could design a 4 year Alpha (α) cycle to rendezvous a cycling habitat every March 20. In similar manner, we could design three other 4 year orbits, beta (β), gamma (γ), and delta (δ); their rendezvous dates could be June 20, Sep 20, and Jan 20, respectively. This could give us a total of 16 deployed cyclers; one of which would rendezvous with Earth on every calendar quarter.Self-Replicating Habitats: To create this many and more cyclers, TE assumes considerable space borne capability; thus, cycling habitats will likely acquire and refine large amounts of asteroidal regolith to create even more habitats. In effect, such vessels might copy themselves (self-replicate) with in-situ materials. A 1980 NASA study, proposed a Moon based factory which would automatically self-replicate. Since that study, there has been major progress in: robotics, miniaturization, nanotechnology, Materials Science, and additive manufacturing; thus, automatic, complete replication of in space facilities is even more feasible. |  | |||||
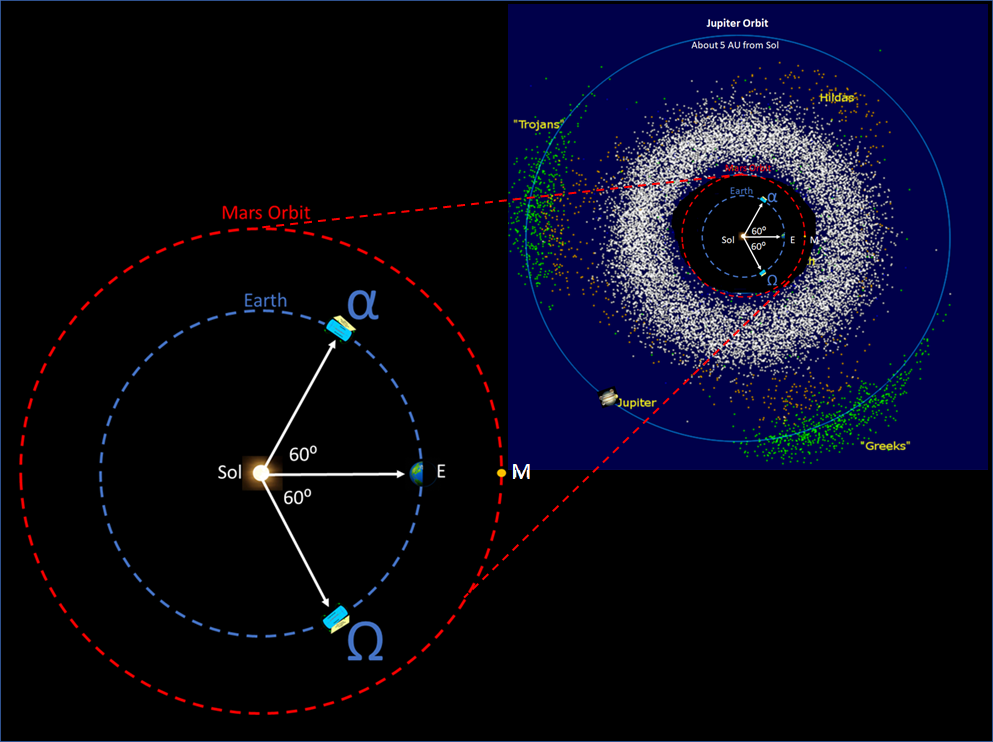 |
CO-ORBITING HABITATS: Alpha and Omega.
Habitat α could lead Terra by 60°, and Habitat Ω could lag Earth by 60°. Both habitats could be safe havens for receiving resources from mining missions.
Purpose. Cyclers could harvest asteroids/comets throughout the Asteroid Belt and bring them to Earth for final processing. However, huge chunks of extraterrestrial material in orbits around Earth presents some impact risk. To reduce risk to either Terra or Luna, one should place these habitats well away from Mother Earth; in this instance, both are 1 AU from Earth.
Omega/Alpha colonies could process cycler payloads at a safe distance from Terra, their Home Planet. At 1.0 AU from Earth, these habitats could safely harvest Asteroid Belt Objects (ABOs) located throughout the wide spaces between Mars and Jupiter.
| |||||
| SUMMARY: Space Tug Pushes Habitats to Asteroid Belt and Beyond | ||||||
 |
To efficiently harvest the vast resources of the Asteroid Belt, habitats need to travel in 4 year cycles.
To safely process asteroidal materials, they should go to large colonial habitats located at positions Alpha and Omega in Earth’s orbit.
| |||||
| ||||||
posted by JimODell at 5:43 AM
![]()
![]()

0 Comments:
Post a Comment
<< Home